前段时间想学习一下 Stable Diffusion,不过发现好像需要先弄懂 VAE (Variational Autoencoder)是咋回事。这里先记一下对 VAE 的朴素理解,ELBO 数学还大看明白,后面单独记一下。
《Intuitively Understanding Variational Autoencoders》这篇文章讲 VAE 背后的 intuition 讲的很不错,这里就相当于人肉总结的性质。
Autoencoder
在看 VAE 之前,先回顾下更古早的 Autoencoder 这个模型:
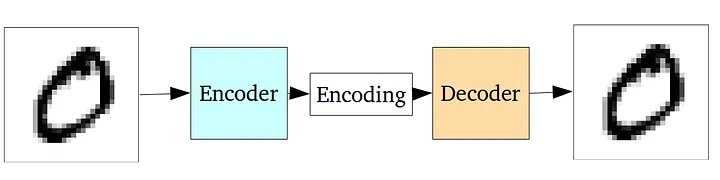
Autoencoder 由两个神经网络组成,左侧的神经网络叫做 Encoder,它能够将输入的图片转成一个低维度的 Encoding 向量(也称作 Latent 向量),右侧的神经网络叫做 Decoder,它负责拿 Encoding 作为输入,还原回来原始的图像。
相当于一个压缩与解压缩的过程。
Encoding 相比原始图片要小的多,通过这个小小的 Encoding 向量,又怎能还原回复杂的原始图像呢?
我们在学习使用神经网络做数字识别时,有一个 intuition 是,面对一个手写输入的 64 x 64 像素的图片,一部分浅层神经元擅长识别「撇」,一部分浅层神经元擅长识别「捺」,每经过神经网络的一层,特征提取的越高级,最终对应一个 10 维的输出。
这个 intuition 也可以拿来理解 Autoencoder 是怎样工作的:Encoder 的神经元识别「撇」「捺」「横」「竖」等画图的构造乃至更为高层、内在的特征,把这部分信息放在 Encoding 里,Encoder 的神经元则学习怎样用这些「撇」「捺」「横」「竖」参考着更高级的特征来画成图。
由于 Encoding 向量的维度受限,整个 Autoencoder 必须学会提取输入图片中最主要的特征,势必对输入的原始信息有一定取舍。这样一来,Encoder 在压缩输入数据时,实际上是在学习数据的内在结构和最重要的特征,有了这些特征,加上 Decoder 神经元掌握的「画法」,就能够尽可能地还原出原始的图像。
Autoencoder 的训练是无监督的,不需要做数据标注,直接将原始的输入与 Decoder 的最终输出做比较即可进行训练。它在训练中使用的损失函数称作 “Reconstruction Loss”,很简单计算下 MSE 即可:
def ae_loss(input, output):
# compute the average MSE error, then scale it up i.e. simply sum on all axes
reconstruction_loss = sum(square(output-input))
return reconstruction_loss
Autoencoder 的局限
训练的好的 Autoencoder 的还原能力是很强的,可见它有很强的绘画能力。但是 Autoencoder 应用场景有限,只有少数图片降噪这种地方有用。
是什么限制了它的发挥?问题就出在 Encoding 向量对我们来讲是一个黑盒:Encoding 向量所在的 Latent space 很可能是离散的,不连续。
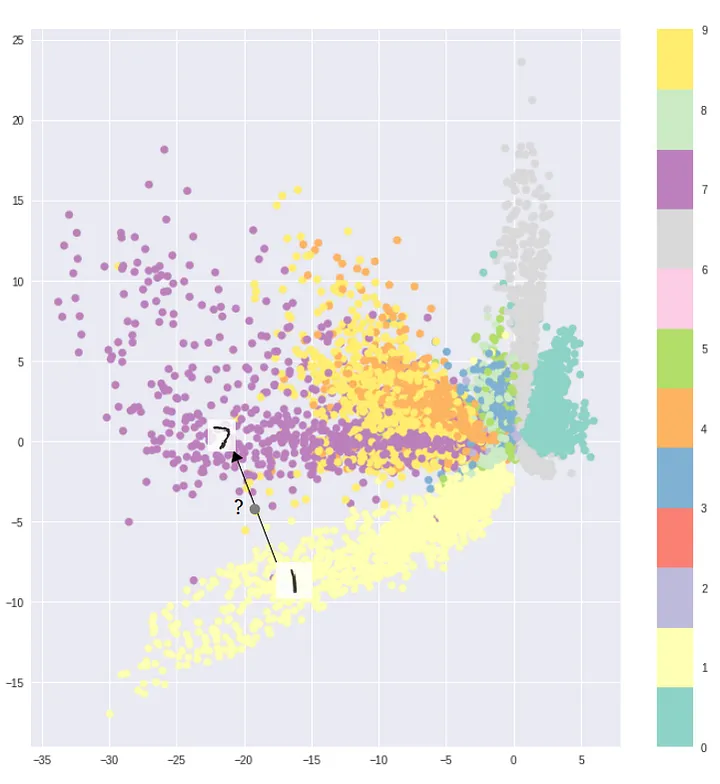
可见典型的 Encoding 之间是有一定聚类的。但是它们并不连续,导致我们不能编排一些我们的需求到 Encoding 向量中来指导 Autoencoder 的生成,也就无法将它作为生成模型来用。如果从 latent space 中随机采样一个向量,跑出来的大概率是噪音。
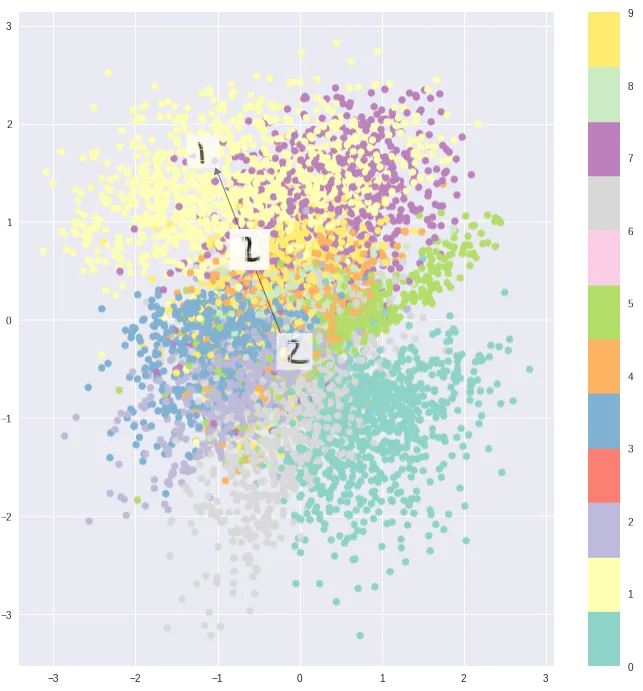
比较理想的状态是,整个 Latent space 能够连续,典型的 Encoding(比如数字 7 和 1 对应的 Encoding)有聚类,在聚类与聚类的边缘采样,能够生成出来含糊的「渐变」流形而不是噪音乱码:
引入 Sampling
VAE 就是解决了这个问题的 Autoencoder。它的 Latent space 是完全连续的,允许随机抽样生成,也可以与文本 Embedding 做对接,就可以做些有用的生成了。
怎样让 Latent space 做到连续?
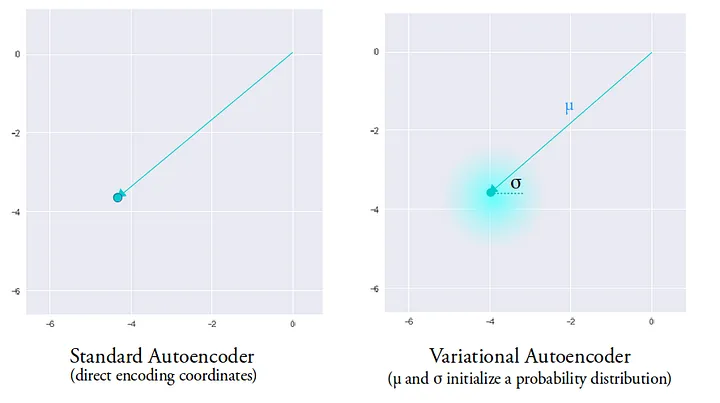
首先要解决的问题是,在 Autoencoder 中每个特征都是呈点状的,搞不好稍微差一点点位置,Decoder 画出来的图就南辕北辙。
VAE 使用两个向量 $\mu$ 和 $\sigma$ 来替代呈点状的 Encoding 向量,并增加了一个 Sample 阶段。$\mu$ 和 $\sigma$ 对应一个正态分布中的平均值和标准差,Sample 就是在这个正态分布中进行采样。
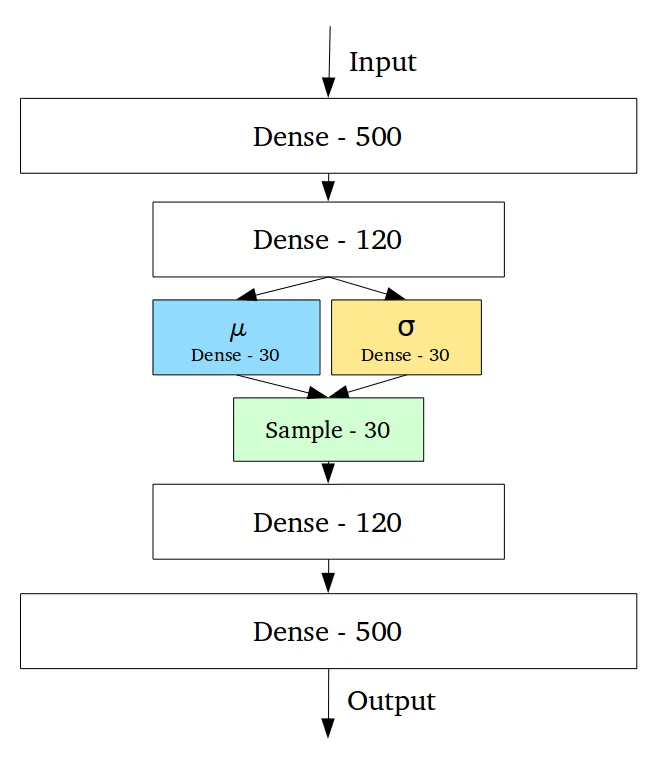
这一来,在训练中 Decoder 能够不那么对点状的 Encoding 向量非此莫属、太过敏感,而是在一个球心是 $\mu$ 半径是 $\sigma$ 的椭圆球空间范围内,都可以还原出图。
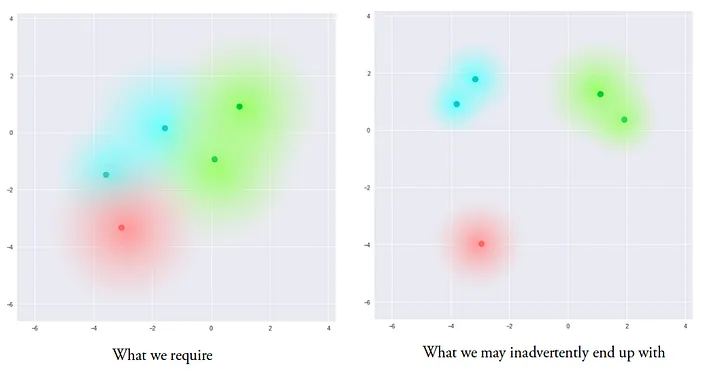
但是神经网络在训练时候仍有可能找到奇怪的偷懒路径,在广大的 Latent space 中,不同的分布之间仍可能距离非常遥远:
KL 散度
VAE 让 Latent space 整体变得连续的思路是,让整个 Latent space 尽量接近一个均值为 0、标准差为 1 的正态分布 $Normal(0, 1)$。
KL 散度(Kullback–Leibler divergence)可以用于衡量两个概率分布之间的差异。比较两个正态分布的 KL 散度的公式是:
$$ D_{KL}(P \parallel Q) = \log \frac{\sigma_Q}{\sigma_P} + \frac{\sigma_P^2 + (\mu_P - \mu_Q)^2}{2\sigma_Q^2} - \frac{1}{2} $$代入均值为 0、标准差为 1 作为要比较的另一个概率分布,针对 $\mu$ 和 $\sigma$ 两个向量来计算 KL 散度的公式是:
$$ \sum_{i=1}^{n} \sigma_{i}^{2} + \mu_{i}^{2} - \log(\sigma_{i}) - 1 $$不过我们在训练中吗需要比较的不是一个正态分布到 $Normal(0, 1)$,而是 N 个正态分布到 $Normal(0,1)$ 的总的差异。这里好像相当于将所有的 KL 散度对比加在一起,仍能反映总的分布和 $Normal(0, 1)$ 的差异,这里可能会有些数学推导还没有看懂,到后面再看好了。
通过把 KL 散度放到损失函数中,也就相当于起到正则化的作用,最终得到这个完整的损失函数:
def vae_loss(input_img, output, log_stddev, mean):
# compute the average MSE error, then scale it up i.e. simply sum on all axes
reconstruction_loss = sum(square(output-input_img))
# compute the KL loss
kl_loss = -0.5 * sum(1 + log_stddev - square(mean) - square(exp(log_stddev)), axis=-1)
# return the average loss over all images in batch
total_loss = mean(reconstruction_loss + kl_loss)
return total_loss
套上 KL 散度之后,训练出来的 Latent space 按说就是比较接近我们想要的分布形状了: